If it's not hard, it's not worth making.
Builds and teardowns from a home workshop — computer-vision drone control, over-the-air DVRs, marble machines, and electronics projects worth the trouble.
Project guides
-
Domino Trains
Probably the most common type of Domino Robot is the toy Domino Train The Atlasonix Domino Train is a battery operated toy that lays a row of dominos behind it as it moves along the floor. The dominos it uses are smaller than standard dominos, but it still works very well and…
-
Lego Domino Robots
Building a Lego machine that sets up dominos is a surprisingly common project. It’s clear that people that love Legos also love dominos. Here are just a few of the projects to be found: The Jkbrickworks build is definitely one of the most impressive. It features a flat stacked…
-
3D-Printed Marble Machine
I’ve always been fascinated with marble machines. These are those contraptions that have marbles moving up through a wheel or ladder and then descending via gravity through a maze. I remember seeing some very large versions of these large Rube Goldberg-esque contraptions in…
-
Comparison of TiVo OTA DVRs
Pictured above is the TiVo Bolt OTA As of September 2019, TiVo only has one OTA DVR product in production – The TiVo Bolt OTA, however you can still find refurbished versions of their older model the Roamio OTA for sale on Amazon. These refurbished units are actually quite…
-
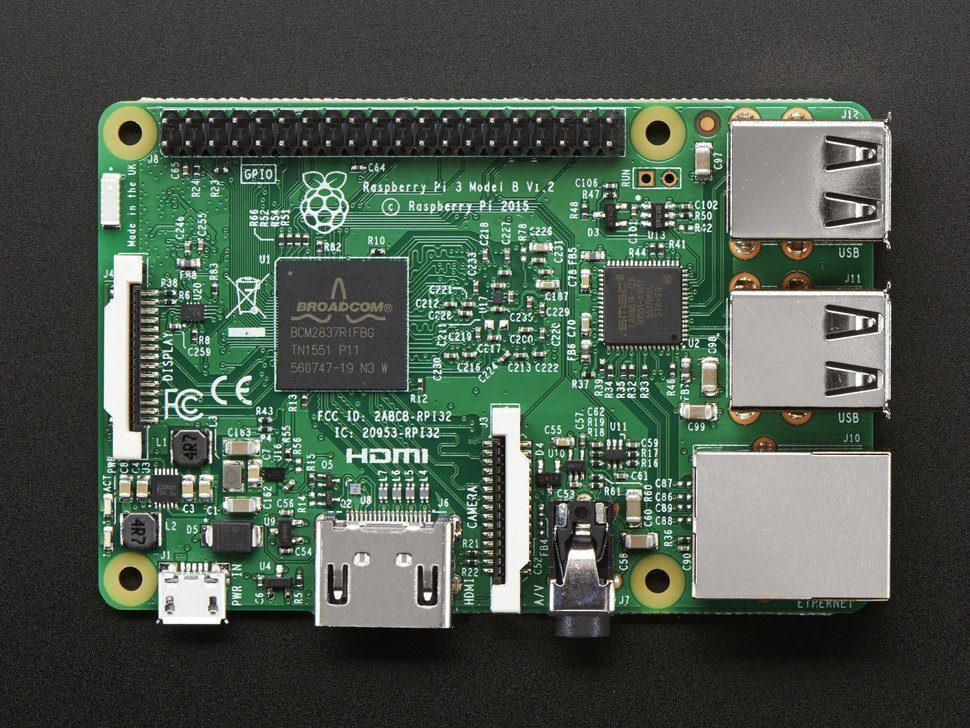
Raspberry Pi 3 Model B
Photo Source Schematic RPI-3B-V1_2-SCHEMATIC-REDUCED Source Mechanical Drawings RPI-3B-V1_2 Design file: DXF Source
-
Comparison of TiVo DVRs for cordcutters
As of July 2016, TiVo has 3 main DVR products in production – The Bolt, the Roamio OTA, and the Roamio Pro. This may change soon though, since Rovi (the company that announced its intended acquisition of TiVo) has said that “Being in the hardware business isn’t something that……
-
Intel Arduino Schematics
Some links to make it easier to find the design information for these Intel boards. Arduino IDE and form compatible board based on Intel Quark SoC X1000 processor. Arduino IDE and form compatible board based on Intel Quark SoC X1000 processor. PCB Design Files (Cadence Allegro)
-
2023 Best Subscription-Free Over-the-Air (OTA) DVRs for Cordcutters
There are few things more satisfying in life than watching TV, fast-forwarding through commercials, and knowing that you are getting it all for free. No cable fee, no streaming subscription — all you need is an antenna and an Over-the-air DVR. In my case, I am able to record all…





Builds & write-ups
All 36 posts →- Food
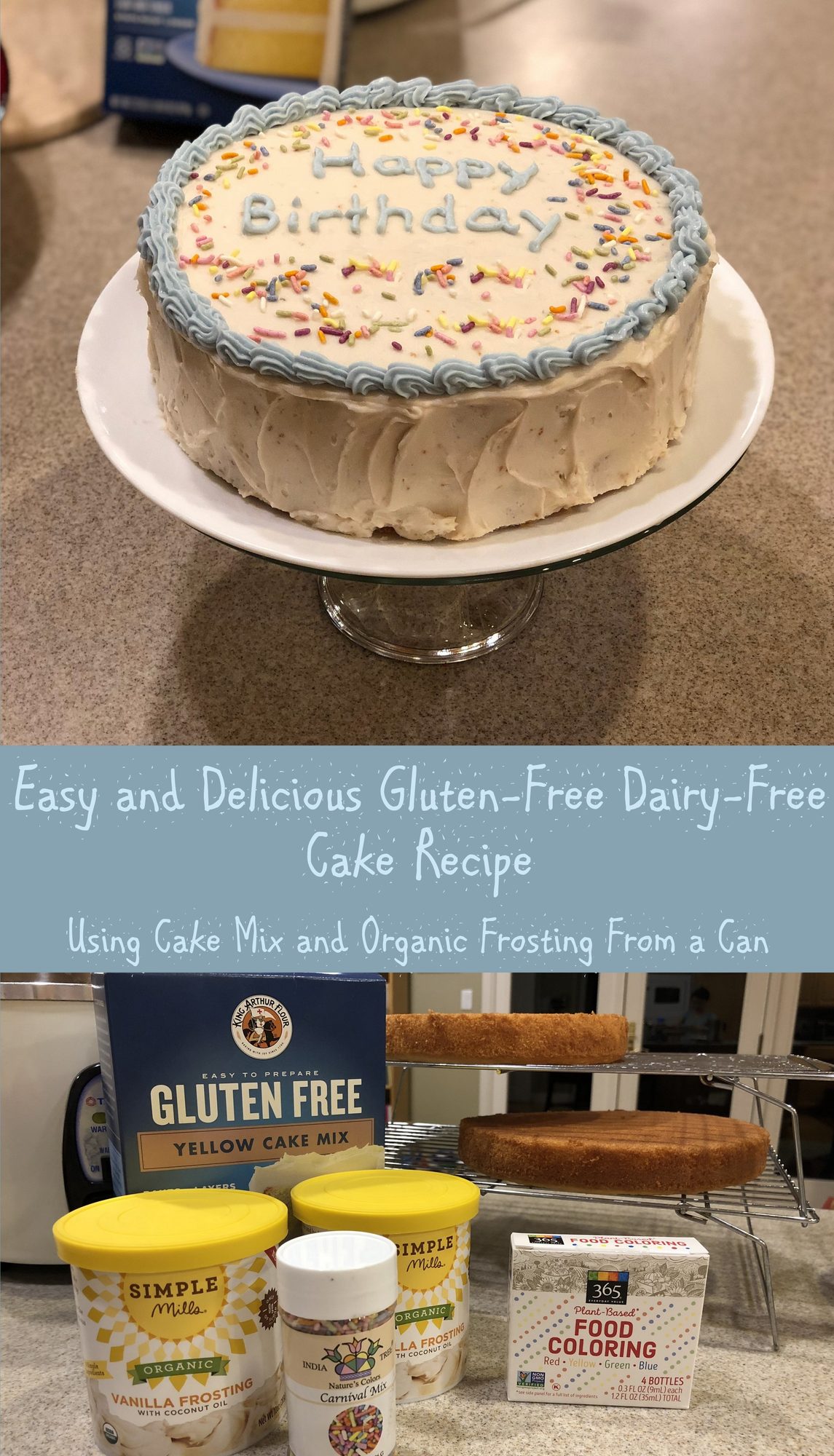
Easy Gluten-Free Dairy-Free Cake Recipe Using Cake Mix
Have food allergies or restrictions? Here’s an easy to make gluten-free and dairy-free cake recipe. All you need is a box of gluten-free cake mix and store-bought dairy-free frosting. So simple and it tastes great too! I try to avoid suspect ingredients and artificial food…
- Kids
Best Dance Shoes for Kids
With school starting, it’s time to buy new dance shoes for your little dancers. I remember being daunted the first time I had to purchase dance shoes for my daughter. My daughter’s dance teacher has always been helpful with shoe recommendations. Now that my daughter has been…
- Kids
Stop Motion Animation for the Girl Scout Entertainment Technology Badge
I covered Part 2 of the Entertainment Technology Badge for Junior Girl Scouts at our troop meeting. At a previous meeting, we learned about badge requirements 2 (video game development), 3 (amusement park science), and 4 (special effects). For Part 2, we investigated badge…
- Drones
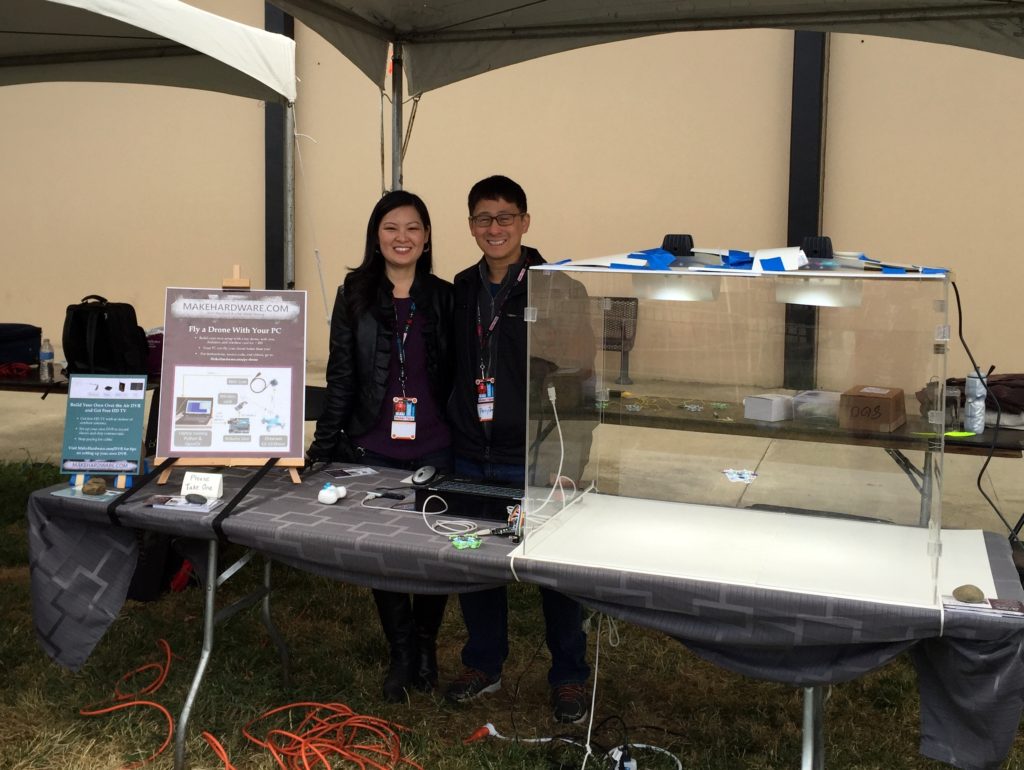
Maker Faire Bay Area 2017
The Maker Faire Bay Area is this weekend, May 19-21, 2017, at the San Mateo Event Center. MakeHardware had a booth at the Maker Faire last year, but we have been too busy to run a booth for 2017. We do plan to attend for a day to check out what other folks have been busy making!…
- Electronics
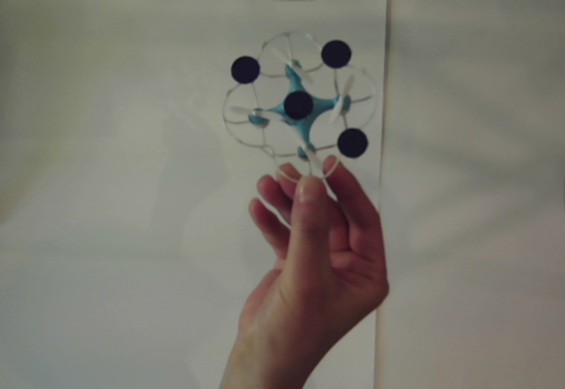
Teambuilding with robotic insects!
I manage a team of electrical engineers, and at the end of every year I like to run a team building event. Last year I bought everyone a mini-drone, and we had a lot of fun flying them around a conference room. This year, I bought a bunch of remote control insect toys and the…
- Kids
Little House on the Prairie Birthday Party
At MakeHardware.com, we love hosting elaborate birthday parties for our kids! I was all for having my daughter’s ninth birthday party at our local paint-your-own-pottery studio, but then my daughter suggested a Little House on the Prairie theme and I couldn’t resist! It’s the…
- Drones
How to Control Your Drone From a Computer
After reading my post about how I used my computer to fly a Cheerson CX-10 drone, several people have asked me if it is possible to control other drones in a similar way. It is in fact pretty straightforward, and in some cases you can re-use exactly the same hardware that I used…
- Drones
Manual Exposure vs Auto Exposure for ELP 2 MP USB Camera
For our drone flying project, we have been using the ELP 2 Megapixel USB Camera. The auto exposure on this camera works in most situations, but we found that it does not always adjust to bright sunlight. In preparation for demonstrating our computer-controlled drone at the Maker…
- Drones
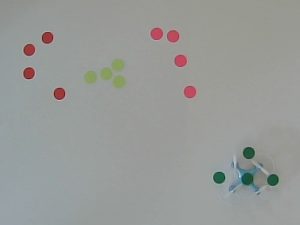
Blob Detection With Python and OpenCV
In my previous post, I described how to set up Python and OpenCV on your computer. Now I will show you how to use OpenCV’s computer vision capabilities to detect an object. OpenCV’s SimpleBlobDetector will be the primary function that we will be using. With the…





Browse by topic
All topics →Drones (11)DVRs (8)Kids (4)Electronics (4)Food (1)
More writing
- The Next Tivo DVR Might Look a Lot Like a Tablo
- OTA-only households growing
- Microsoft Putting Xbox DVR features on Hold
- Find Out Which Channels You Can Get For Free With an Antenna
- How to Set Up Your Python OpenCV Development Environment
- Teach your PC to fly a Mini-Drone!
- What is an OTA DVR and why would I want one?
- Finding a low-latency webcam
- How to Get Your Boss to Buy You a Quadcopter
- 3D Printed Spaceship Blade Guards for the Cheerson CX-10
- Cheerson CX-10 Repair Guide and Tips
- The Cheerson CX-10, CX-10A , CX-10C, CX-10D, CX-10WD, CX-10WF and Related Mini-Quadcopters
- Mods and Hacks for the Cheerson CX-10
- Dancing Penguin Robots!
- The Shenzhen-FBA (Fulfillment by Amazon) business model
- The Amazing Shenzhen Electronics Market
- Windows 10 is not for me
- Broken television guide in Windows Media Center after July 20, 2015
- Build your own OTA Antenna DVR
- Celebrities biking with their kids!
- The Best Tip Ever for Teaching Your Kid to Ride a Bicycle
- Kids Strider or Balance Bikes
- Children’s Bicycle Helmets
- Bicycle trailers for kids
- Best Birthday Gifts
- Book Review of Free-Range Kids
- Build your own DVR and get free HD TV